HARRIS CORNER DETECTOR
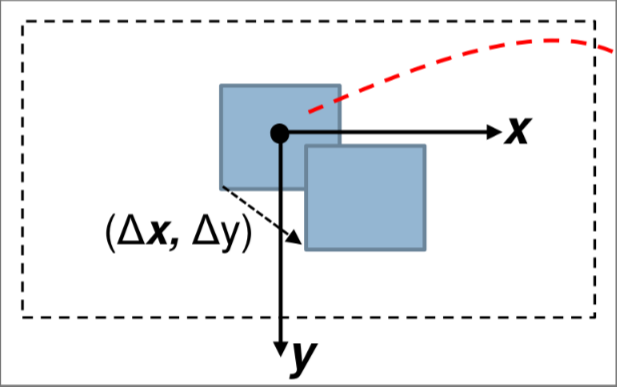
This detector relies on a continuous reformulation of the Moravec neighbor differences. A generic infinitesimal shift from the point location can be described as
With as a weight function (gaussian function)
Due to the fact that it’s a continuous formulation intensity function can be approximated with it’s Taylor polynomial form
So the edge function can be described as
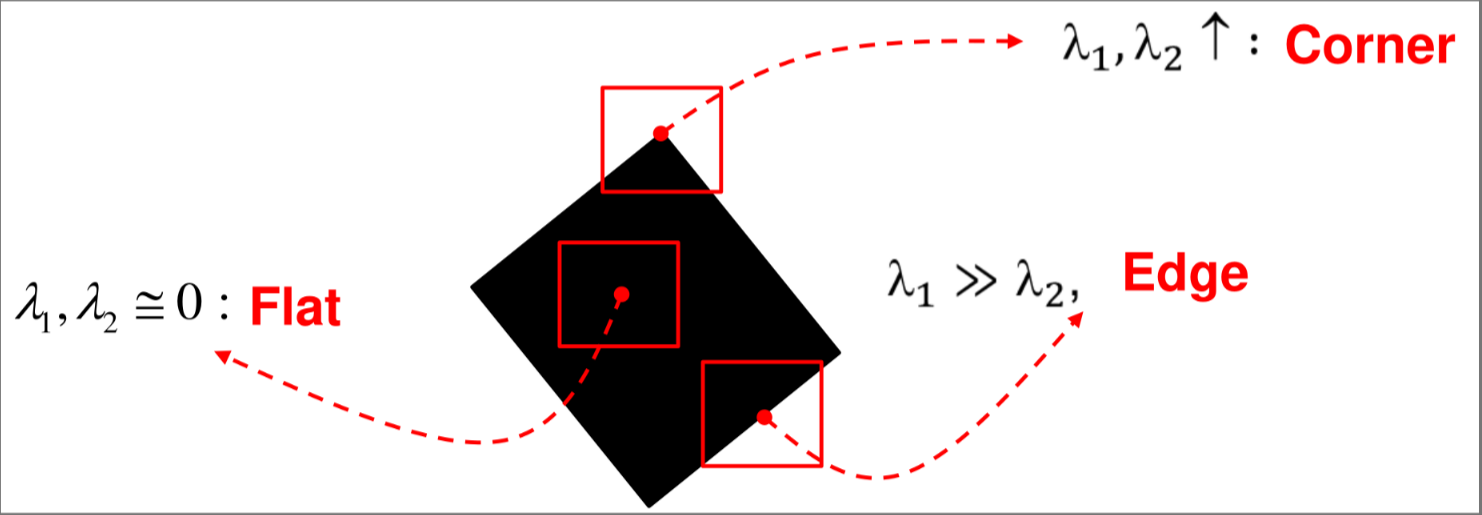
Where the matrix encode the characteristics of the structure around the pixel, also is real and symmetric so the correspondent diagonal matrix can always be computed from the eigenvectors
the coefficients can be used to distinguish corners
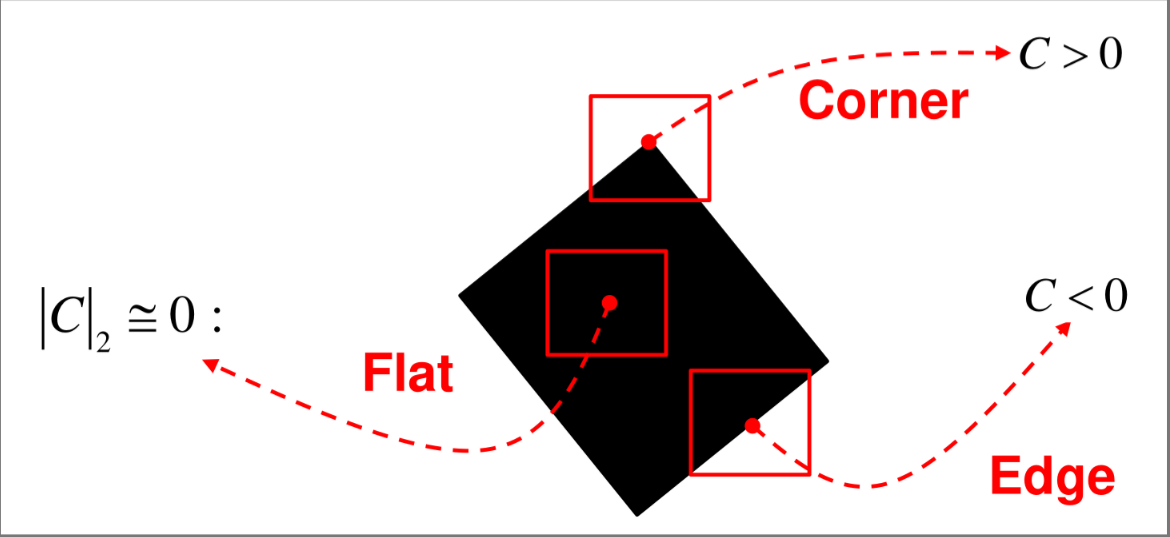
But Computation of the eigenvector is expensive so a better approximation can be deployed
And with this corner can be detected as
So in conclusion the corner detection algorithm can be described as follows
flowchart TD A[compute C at each point of the image] B[filter points based on threshold T] C[detect points that are local maxima NMS] A --> B B --> C
In order to weights better the points in the neighborhood the weight function used is a Gaussian function