PERSPECTIVE PROJECTION
The model that rules the conversion from a 3D scene to an image is called perspective projection, it’s based on the pinhole camera model and it goes like follow:
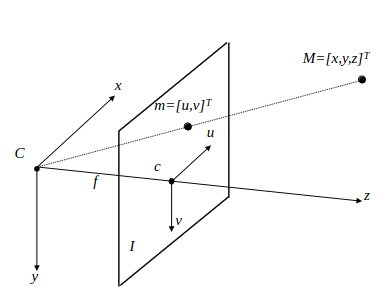
from this model are derived the equation to map a 3D point to a 2D coordinate are as follow
It’s important to notice that this equations are inversely proportional in respect to the depth of the point in the 3D world
INFORMATION LOSS
This set of equation is not bidirectional as we are representing a 3D world with a 2D image, so the information loss is inevitable, in the process the following informations are lost:
- ratios of lenghts (unless they are paralel to the image plane)
- parallelism between line (unless they are paralel to the image plane)
- depth of a point
In order to recover the depth information stereo image acquisition can be used
VANISHING POINTS
The vanishing point of a 3D line is the image of the point at infinity of the line (i.e. the image of the point on the line which is infinitely distant from the optical center).
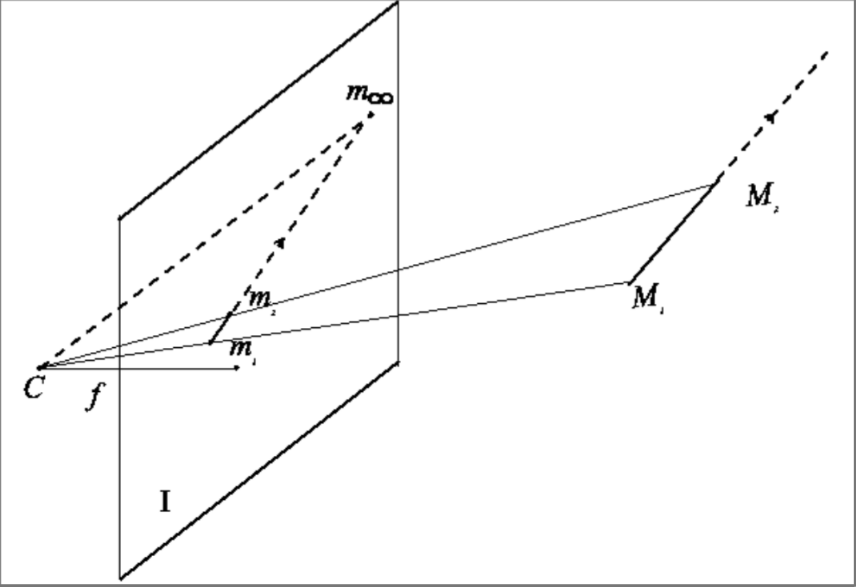
with such definition all 3D lines in the image will share the same vanishing point
in a real case application this model alone it’s not sufficient, there are real camera parameters and lens effects to take into account. In order to apply some computation to an image digitization is also needed.