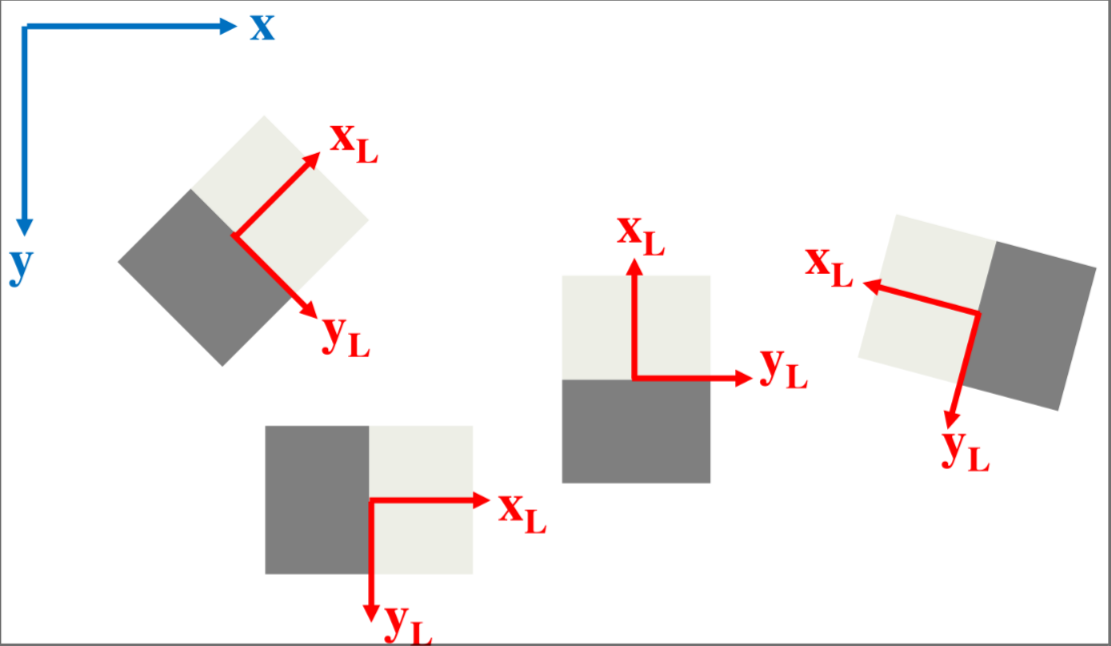
CANONICAL ORIENTATION
In order to obtain a reference frame for computing the descriptor of a keypoint a local reference frame is needed, one solution is to chose the direction in which most of the gradient is found
DOG CANONICAL ORIENTATION
Given a keypoint the orientation and magnitude is given by
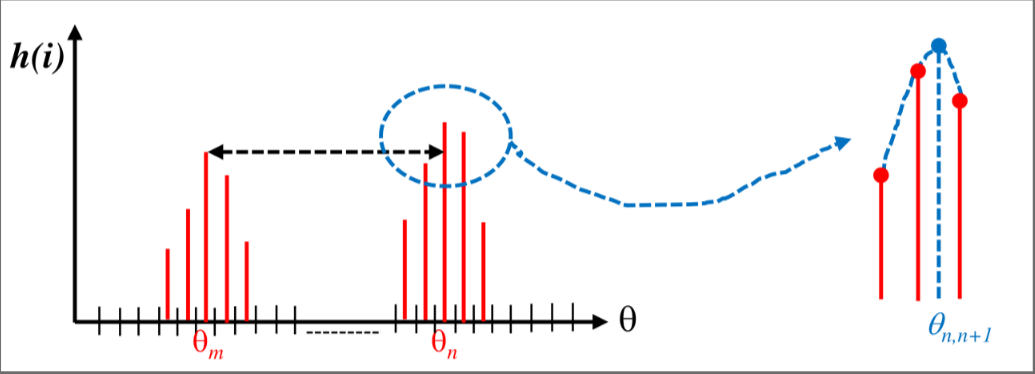
Then an orientation histogram is computed with a bin size of with the contributions of each pixel of the belonging to a neighborhood of the keypoint.
The contribution of a single point is obtained by the gradient magnitude weighted by a Gaussian with to account for the scale of the keypoint
then the highest peak of the histogram is considered for the canonical orientation with the 2 neighbors