PERSPECTIVE PROJECTION MATRIX ()
The it’s the linear representation of the perspective projection in a perspective space
Let’s take the relation between points of the 3D world and the 2D image representation:
and translate them in a perspective space ( and ), in this representation the relation between points of the real world and the image plane became a linear transformation (the PPM):
we can also use a focal length based metric to express the
This form of the show it’s basic operation which is to translate point in a 3D space into a 2D space scaling them by distance
we can represent it also in matrix notation:
ADJUSTING THE MODEL
In this form the does not take into account the space relation between the image plane and the 3D world (rotation and translation), also digitizaiton effects are not considered.
ACCOUNTING FOR DIGITIZATION
In order to account for digitization the image coordinates are scaled by the pixel dimensions
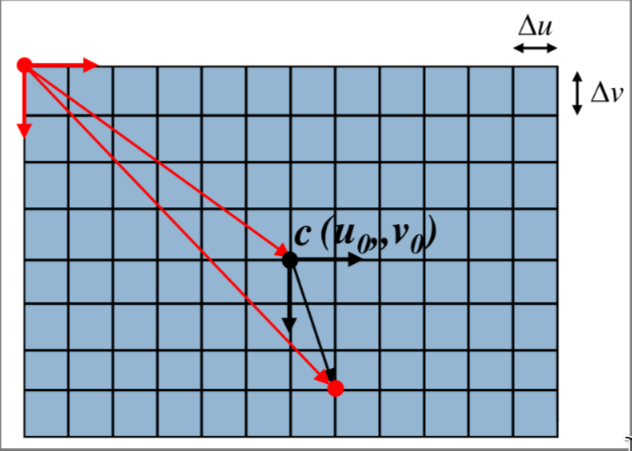
Based on this equation the becomes as follows
the matrix is called the intrinsic parameter matrix, it represents the parameter
ACCOUNTING FOR ROTATION AND TRANSLATION
In the previous models the camera and the 3D world point where assumed to refer to the same reference frame, in real case application this is impossible and the camera reference frame (CRF) and the world reference frame (WRF) are related by a rotation and a translation .
So the relation between a point in the real world the correspondent image point can be expressed as follows:
where is a matrix which represents the rotational component and is a vector which represent the translation component.
In the perspective space the relation becomes:
The matrix that represents the translation and rotation between the two reference frame is called extrinsic parameter matrix
FINAL FORM OF A
putting together the equation the final form of a matrix looks like follows
So the general form of the can be described as follows
So in conclusion a can be thought as 3 separate components:
- the matrix which represents the intrinsic properties of the image sensor
- the matrix which represents the relation between the 2 different reference frames
- the matrix which represents the perspective projection carried out by the pinhole camera model