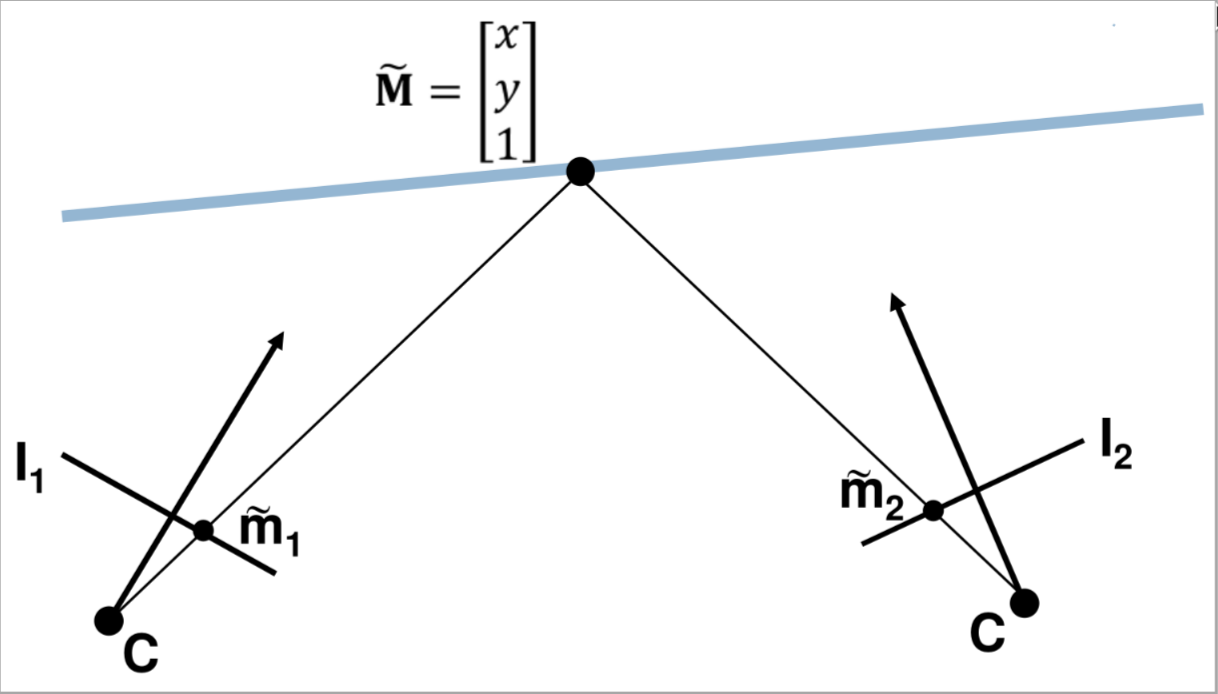
HOMOGRAPHY
Let’s take the case where the camera is imaging a planar scene, in this case it can be said that the , in this scenario the becomes
this is exploited in camera callibration with the zhang’s method.
PROPERTIES
cause two distinct images of a planar scene are related by homography
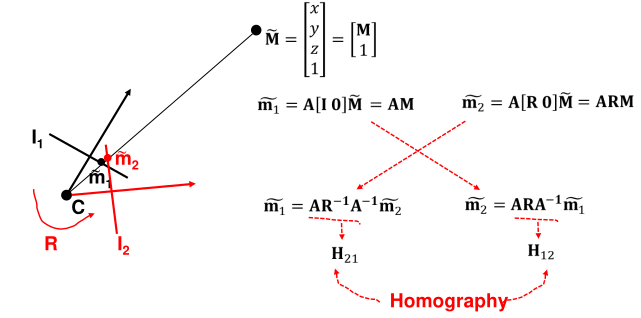
ROTATION RELATION
Any two images taken by a camera rotating about the optical center are related by homography
INTRINSIC PARAMETER RELATION
any two images taken by two different cameras (different matrix so different intrinsic parameters) in a fixed pose are related by homography
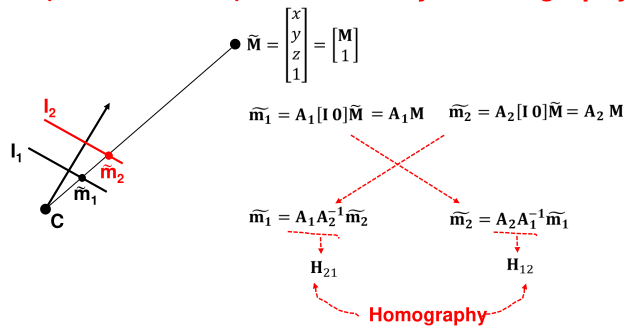
In conclusion we can say that if the camera is imaging a planar scene we can find relations between images that are taken from different angles or with different camera sensors