EDGES
Edges are local features that capture important information of the semantic content of the image. They are defined as the set of pixels laying between two image regions with different light intensity
1 DIMENSIONAL STEP EDGE
In this situation an edge can be seen as a peak of the first derivative of the intensity pixel function
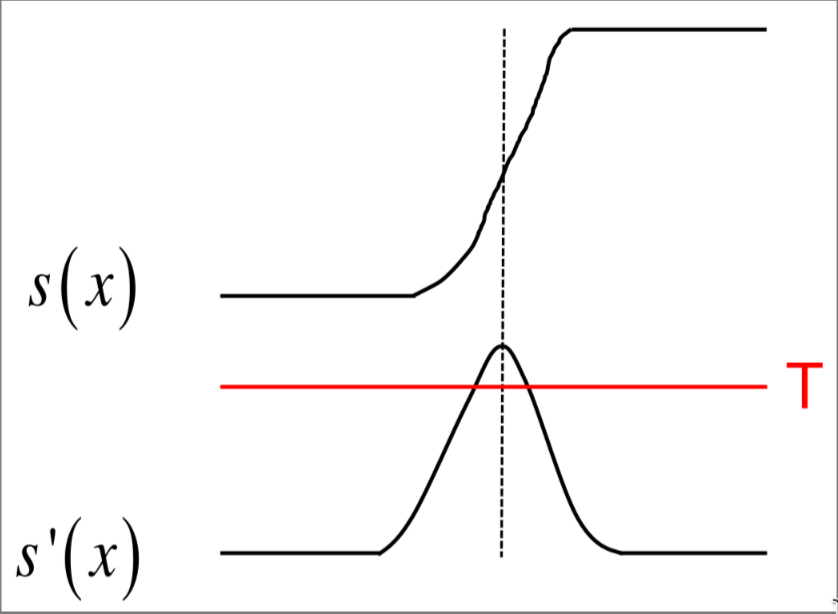
So in order to detect edge in this situation is sufficient to threshold the first derivative
flowchart LR A["S(x)"] B["d(S)"] C[T] D["e(x)"] A --> B --> C --> D
2 DIMENSIONAL STEP EDGE
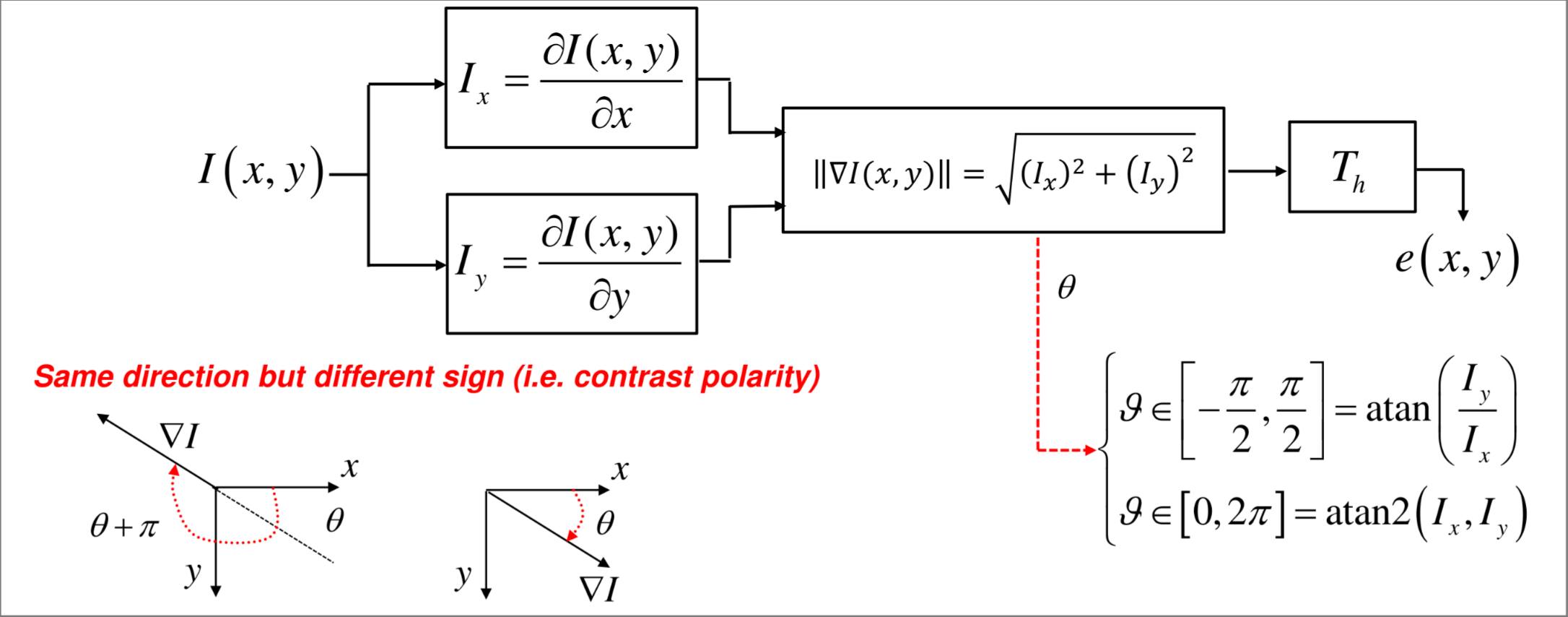
In a 2D image input signal edge is characterized also by direction, In this context the derivative is no more sufficient and the gradient function is used
The gradient direction is the direction where the intensity function show the maximum variation
FIRST DETECTION PIPELINE
GRADIENT APPROXIMATION
In order to compute the gradient efficiently a discrete approximation is needed, multiple choices are possible
backward or forward differences
or central differences
There are also a lot of ways to approximate the gradient intensity
NOISE PROBLEMS
Due to the nature of the derivative operation of amplifying noise the input signal needs to be smoothed out to allow a correct edge detection
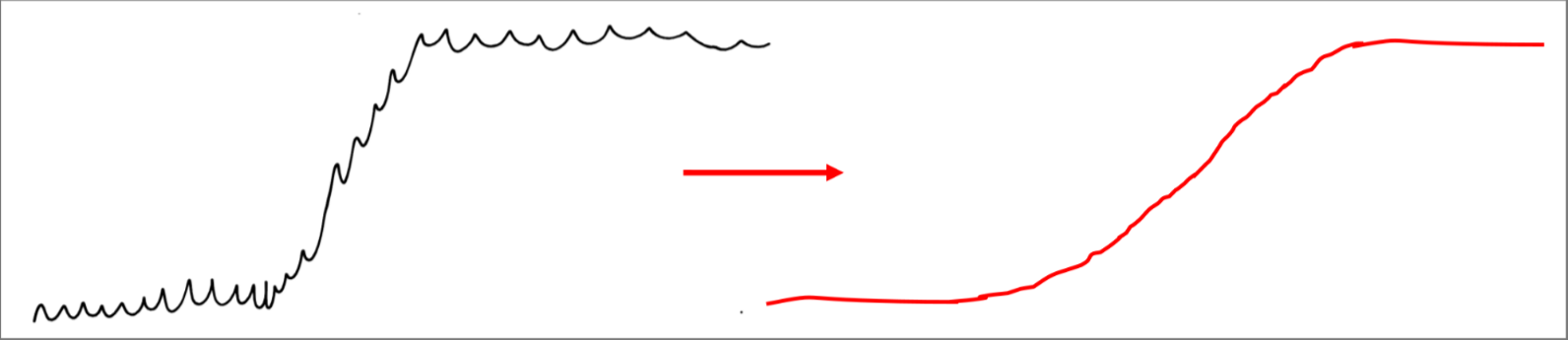
the smoothing process and the derivative can be carried out by a single operation using the mean of point in the derivative approximation step
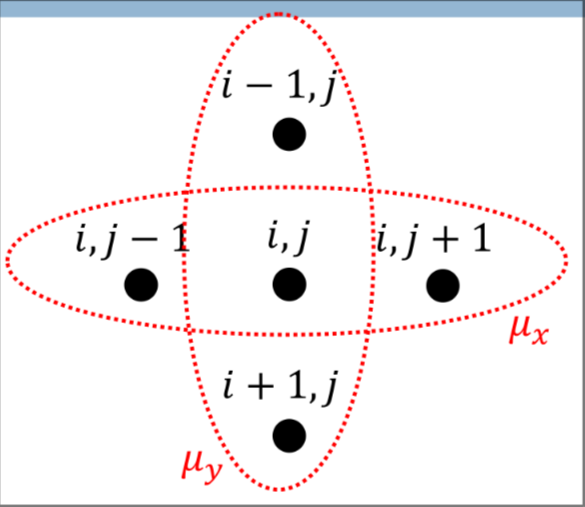
And then the derivative is obtained by the difference of the means
DERIVATIVE VARIANTS
There are some operator with some additional features
- Prewitt operator which takes into account central differences (better for diagonal edges)
- Sobel operator which Weights more the point on the center in order to improve isotropy
FINDING MAXIMA TO LOCALIZE EDGES
It’s difficult to localize edge in an image just by thresholding, a too low threshold could result in a poor localization of the edge (e.g. thick edges)
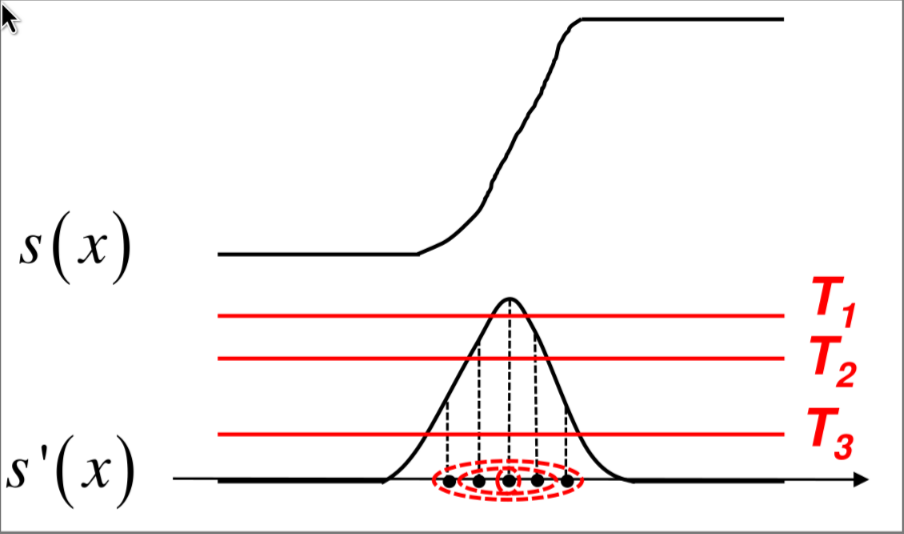
A better way to localize the edges is to find the local maxima of the absolute value of the derivative
NON MAXIMA SUPRESSION (NMS)
The idea is to use the discrete representation of the gradient discussed earlier to compute an algorithm that identifies local maxima points.
So given a point in an image
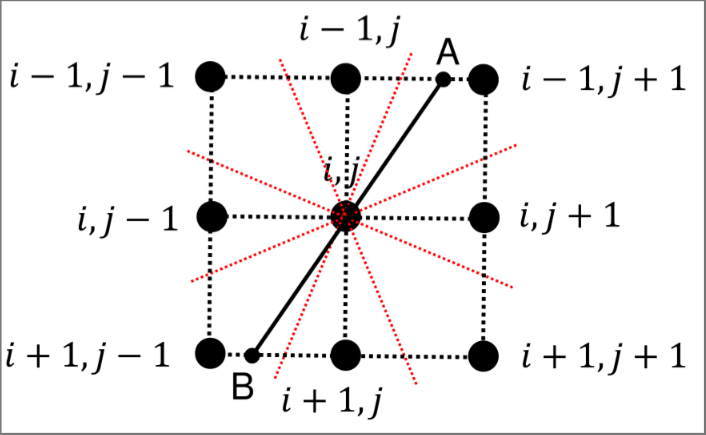
The gradient in the line from to can be approximated as follows
And with this approximation the NMS can be obtained as follows
FINAL EDGE DETECTOR PIPELINE
With this considerations the final edge detection pipeline looks like this
flowchart LR A["I"] B["I_x"] C["I_y"] D["|| I ||"] E["NMS"] F["T_h"] G["E"] A --> B & C --> D --> E --> F --> G
There is a final thresholding step in order to avoid detection of unwanted edges.