GAUSSIAN FILTER
Gaussian filter is an LTE operator with a 2D Gaussian function as a impulse response (with and a constant diagonal covariance matrix)
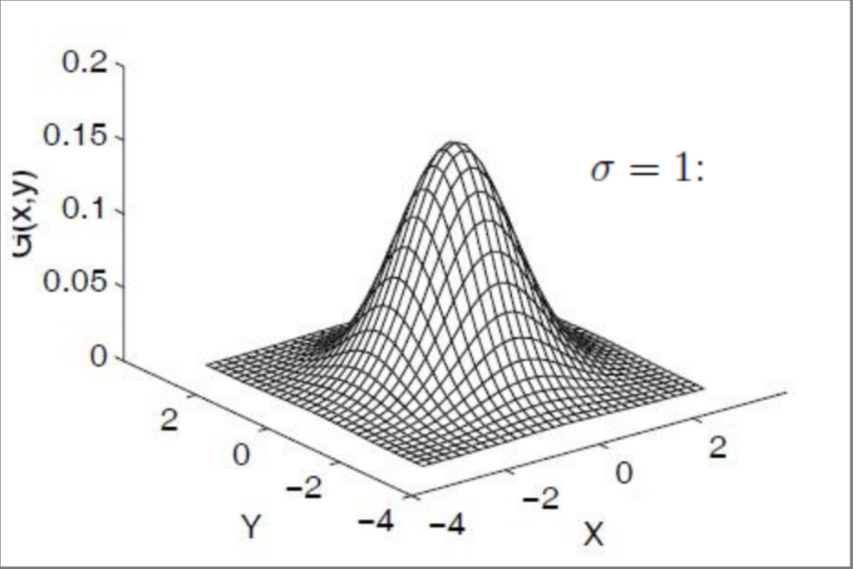
The effect of increasing can be seen as reducing the importance of the closest points and increasing the importance of farther points smoothing the image
CHOOSING KERNEL SIZE
In a real implementation the Gaussian function need to be approximated by a discrete representation by sampling the function in a kernel matrix, so the matrix size need to be set
- with higher size matrix becomes more accurate
- computational cost grows with matrix size
so a rule of thumb is to select the kernel size based on the value as
as covers the 99% of the area of the function (energy)
EXPLOITING SEPARABILITY TO IMPROVE PERFORMANCE
To improve the computational complexity, the separability of the 2D Gaussian function can be used as
The speedup improvements of this process can be expressed as