R-tree
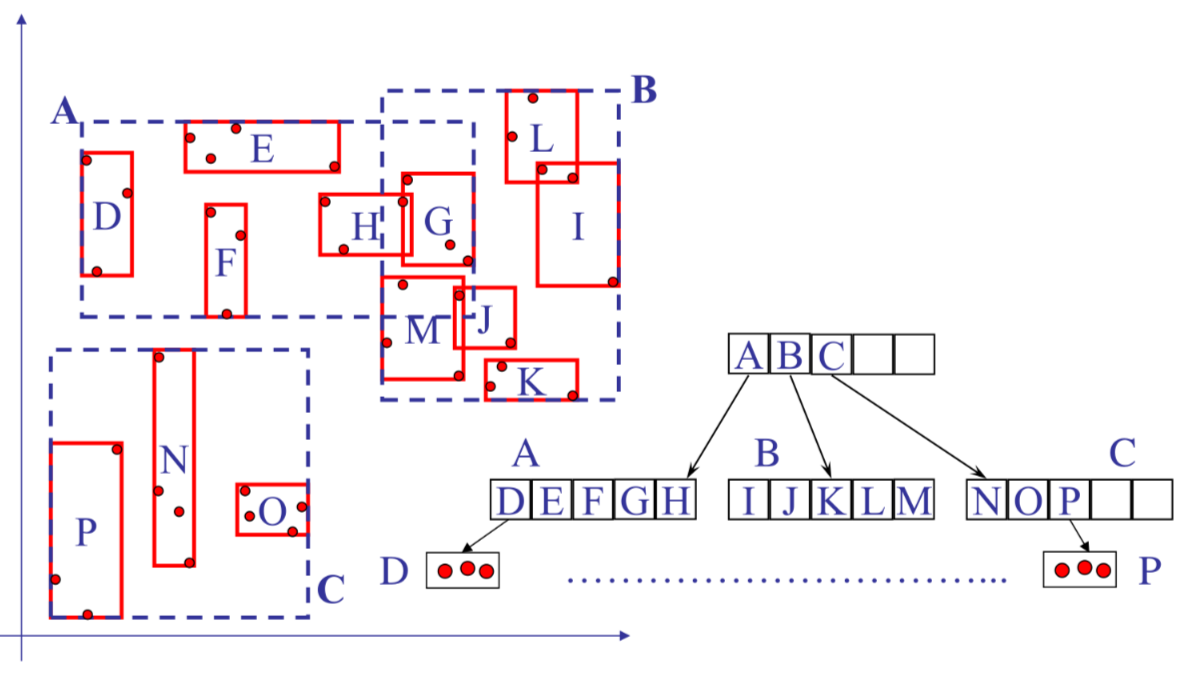
Gli r-tree sono alberi paginati e bilanciati dove ogni nodo corrisponde a una regione triangolare detta minimal bounding box (MMB) che contiene tutte le regioni figlie
L’utilizzo dello storage da parte di un nodo varia dal a un valore minimo inferiore al (parametro tunabile)
Le foglie dell’albero sono entry nella forma (key, RID), dove il valore di chiave contiene le coordinate
possibile contenere anche oggetti con un estensione spaziale
I nodi interni dell’albero si presentano nella forma (MBB, PID), dove la chiave sono le coordinate della minimal bounding box
Concetto di MBB
La minima bounding box e definita come la regione hyper-rettangolare minima che contiene un set di punti
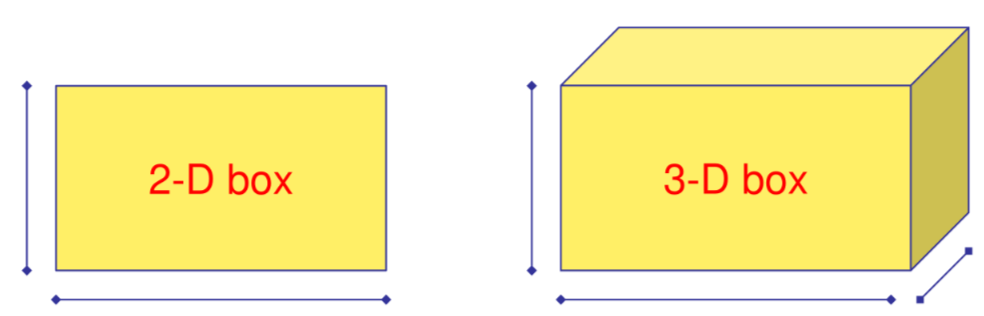
Per definirla e sufficiente conoscere le coordinate di due vertici opposti
R-tree vs b+tree
| B+tree | R-tree |
|---|---|
| bilanciato e paginato | bilanciato e paginato |
| i dati sono contenuti nelle foglie | i dati sono contenuti nelle foglie |
| le foglie sono ordinate | non esiste l’ordine |
| i dati sono organizzati in intervalli monodimensionali | i dati sono organizzati in intervalli multidimensionali |
| la ricerca puntuale segue un solo percorso dell’albero | la ricerca puntuale può seguire strade diverse all’interno dell’albero |
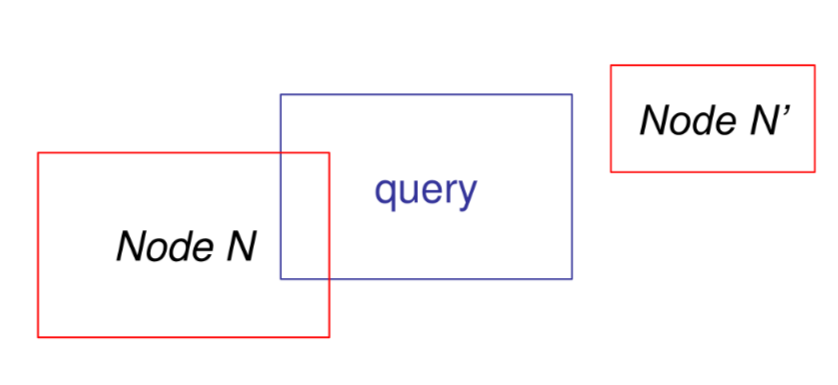
Ricerca con r-tree
La ricerca con un r-tree consiste nel trovare tutti i punti che fanno parte della bounding box della query di ricerca
Per implementare la ricerca e necessario implementare le API previste dalla specifica GiST
Consistent(E,q)ritorna true solo seEeqhanno intersezione non nullaUnion(P)l’output e la MMB che contiene tutte le entryPenalty(E1,E2)Se il punto si trova dentro la bounding box la penalty e0altrimenti e data dal aumento di dimensione della bounding box stessaPicksplit(P)in output vengono fornite le entry e l’output e un set di due bounding box con cardinalità inferiore, lo split viene deciso minimizzando l’area complessiva delle due MBB
minimizzare la somma complessiva e un problema Np-hard